Considérons la configuration suivante :
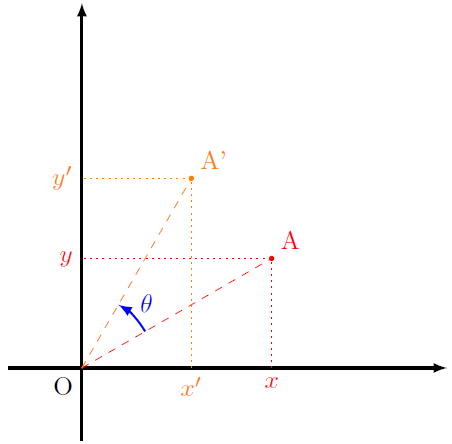
Dans le repère orthonormé d’origine O, A(x;y) est un point quelconque et A'(x’;y’) est son image par la rotation de centre O et d’angle \(\theta\). On cherche à exprimer x’ et y’ en fonction de x, y et \(\theta\)…
Un peu de trigonométrie
Complétons la figure précédente en introduisant un angle :
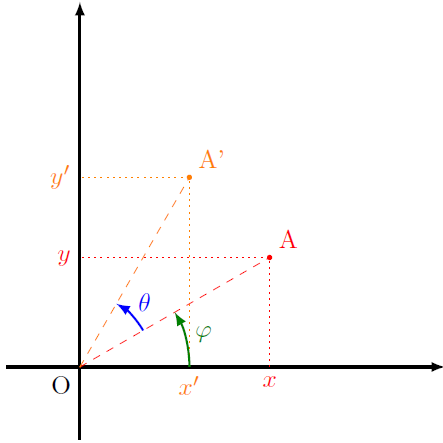
Dans le triangle rectangle rouge (OAx), on a : $$(1)\qquad\begin{cases}x&=OA\cos\varphi\\y&=OA\sin\varphi\end{cases}$$
Dans le triangle rectangle orange (OA’x’), on a : $$\begin{cases}x’&=OA’\cos(\theta+\varphi)=OA’\big[\cos\theta\cos\varphi-\sin\theta\sin\varphi \big]\\y’&=OA’\sin(\theta+\varphi)=OA’\big[\sin\theta\cos\varphi+\sin\varphi\cos\theta \big]\end{cases}$$Or, OA = OA’ donc ceci revient à écrire, en tenant compte des égalités (1) : $$\begin{cases}x’ & = x\cos\theta\ – y\sin\theta\\y’ & = x\sin\theta + y\cos\theta\end{cases}$$
Notation matricielle
Du système : $$\begin{cases}x’ & = x\boxed{\cos\theta}+ y\boxed{-\sin\theta}\\y’ & = x\boxed{\sin\theta} + y\boxed{\cos\theta}\end{cases}$$ on peut « extraire » les coefficients encadrés et les mettre dans un tableau: $$\begin{array}{|c|c|}\hline\cos\theta & -\sin\theta\\\hline\sin\theta & \cos\theta\\\hline\end{array}$$que l’on va tout de suite représenter différemment, pour simplifier, sous la forme suivante : $$\begin{pmatrix}\cos\theta & -\sin\theta\\\sin\theta & \cos\theta\end{pmatrix}.$$C’est cette représentation que l’on va appeler « matrice de rotation ». Le système : $$\begin{cases}x’ & = x\cos\theta\ – y\sin\theta\\y’ & = x\sin\theta + y\cos\theta\end{cases}$$ peut alors s’écrire de manière matricielle ainsi : $$\begin{pmatrix}x’\\y’\end{pmatrix}= \begin{pmatrix}\cos\theta & -\sin\theta\\\sin\theta & \cos\theta\end{pmatrix} \begin{pmatrix}x \\ y\end{pmatrix}.$$
Obtenir une équation de la droite image par rotation
Considérons une droite (d) d’équation réduite \( y = mx + p\). Cherchons une équation cartésienne de l’image (d’) de (d) par la rotation de centre O et d’angle \(\theta\).
Notons \(\vec{u}\binom{1}{m}\) un vecteur directeur de (d) et \(\vec{u’}\binom{a}{b}\) un vecteur directeur de (d’) de sorte que \(\|\vec{u}\|^2=\|\vec{u’}\|^2=1+m^2\). Alors,$$\vec{u}\cdot\vec{u’}=\|\vec{u}\|\times\|\vec{u’}\|\times\cos\theta=(1+m^2)\cos\theta$$et par suite:$$\begin{cases}a^2+b^2&=1+m^2\\\vec{u}\cdot\vec{u’}&=a+bm=(1+m^2)\cos\theta\end{cases}$$
On peut alors écrire, dans un premier temps:$$a=(1+m^2)\cos\theta-bm$$ et en substituant dans l ‘autre équation, on obtient ensuite:$$(1+m^2)^2\cos^2\theta-2bm(1+m^2)\cos\theta+(1+m^2)b^2=1+m^2$$soit, en simplifiant par \(1+m^2\):$$b^2-(2m\cos\theta) b+(1+m^2)\cos^2\theta-1=0.$$C’est une équation du second degré en \(b\) de discriminant:$$\Delta=4m^2\cos^2\theta-4\big[ (1+m^2)\cos^2\theta-1\big] = 4\sin^2\theta$$dont les solutions sont:$$b=m\cos\theta\pm|\sin\theta|.$$On en déduit alors:$$a=\cos\theta\pm m|\sin\theta|.$$ Prenons, pour simplifier:$$b=m\cos\theta+|\sin\theta|\quad,\quad a=\cos\theta – m|\sin\theta|.$$
Une équation cartésienne de (d’) est de la forme:$$bx-ay+c=0.$$Or, le point de coordonnées \( \begin{pmatrix}\cos\theta & -\sin\theta\\\sin\theta & \cos\theta\end{pmatrix} \begin{pmatrix}0 \\ p\end{pmatrix} = \begin{pmatrix}-p\sin\theta \\ p\cos\theta\end{pmatrix} \) appartient à (d’), comme image du point d’intersection de (d) avec l’axe des ordonnées par la rotation r. On en déduit alors que:$$c=pa\cos\theta+pb\sin\theta$$soit:$$c=p\cos^2\theta+p\sin\theta|\sin\theta|-m\cos\theta|\sin\theta|+mp\cos\theta\sin\theta$$Une équation cartésienne de (d’) est donc:$$\begin{array}{l}\big(m\cos\theta\pm|\sin\theta|\big)x-\big(\cos\theta \pm m|\sin\theta|\big)y\\+p\sin\theta\big(m\cos\theta+|\sin\theta|\big)+p\cos^2\theta+p\sin\theta|\sin\theta|-m\cos\theta|\sin\theta|+mp\cos\theta\sin\theta\big)=0\end{array}$$
Un peu de Python
Si nous avons fait cela, c’est peut-être pour nous simplifier la vie un peu plus tard… On peut, avec cette dernière formule, écrire un programme Python qui nous donne directement une équation cartésienne de (d’) en fonction des paramètres m et p que l’on entre au clavier.
from math import cos,sin,pi
import matplotlib.pyplot as plt
m = float(input("Entrer le coefficient directeur 'm' : "))
p = float(input("Entrer l'ordonnée à l'origine 'p' : "))
t = float(input("Entrer l'angle de la rotation de centre O (en degré) : "))
t = t*pi/180
b = m*cos(t) + abs( sin(t) )
a = -m*abs( sin(t) ) + cos(t)
c = p*cos(t)*a + p*sin(t)*b
print(f'{b}x+{-a}y+{c}=0')
# tracé
fig = plt.figure()
axes = fig.add_subplot(111)
axes.set_frame_on(True)
axes.yaxis.tick_left()
axes.xaxis.set_visible(True)
(xmin, xmax) = (-5,5)
(ymin, ymax) = (-20,20)
axes.add_artist(plt.Line2D((xmin, xmax), (0, 0),
color = 'magenta', linewidth = 1))
axes.add_artist(plt.Line2D((0, 0), (ymin, ymax),
color = 'magenta', linewidth = 1))
x = [-5 , 5]
y = [-5*m+p , 5*m+p]
plt.plot(x,y,label='(d)')
y = [b*(-5)/a+c/a , b*5/a+c/a]
plt.plot(x,y,color='r',label="(d')")
legend = fig.legend(loc='upper center', shadow=True, fontsize='x-large')
plt.show()
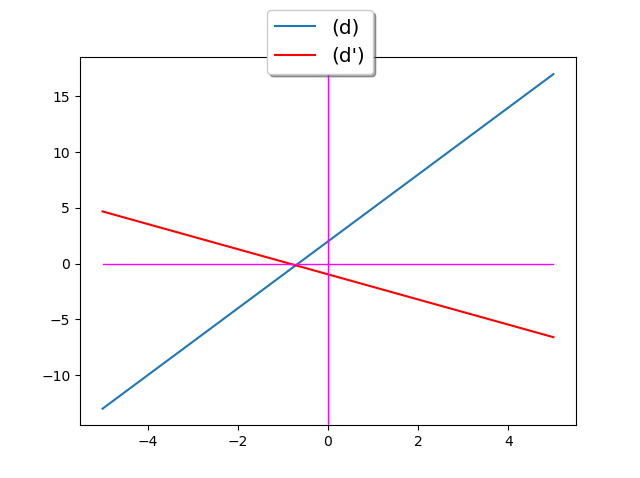
Par défaut, le repère n’étant pas orthonormé, l’angle que l’on voit n’est pas représentatif. Voyons donc un autre code :
from math import cos,sin,pi
import matplotlib.pyplot as plt
m = float(input("Entrer le coefficient directeur 'm' : "))
p = float(input("Entrer l'ordonnée à l'origine 'p' : "))
t = float(input("Entrer l'angle de la rotation de centre O (en degré) : "))
t = t*pi/180
b = m*cos(t) + abs( sin(t) )
a = -m*abs( sin(t) ) + cos(t)
c = p*cos(t)*a + p*sin(t)*b
print(f'{b}x+{-a}y+{c}=0')
# tracé
fig = plt.figure()
plt.axis('equal')
plt.grid(axis='both',color='lightgray', linestyle='--')
x = [-8 , 8]
y = [0 , 0]
plt.plot(x,y,linewidth=1,color='black')
x = [0 , 0]
y = [-6 , 6]
plt.plot(x,y,linewidth=1,color='black')
x = [-5 , 5]
y = [-5*m+p , 5*m+p]
plt.plot(x,y,label='(d)')
y = [b*(-5)/a+c/a , b*5/a+c/a]
plt.plot(x,y,color='r',label="(d')")
legend = fig.legend(loc='upper center', shadow=True, fontsize='x-large')
plt.show()
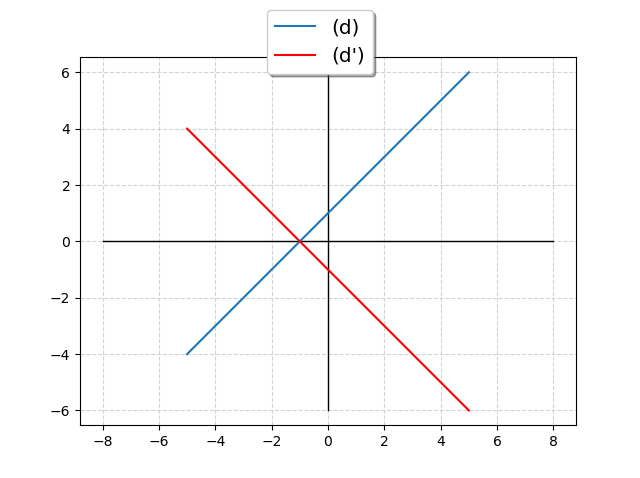
Sur ce dernier exemple, on voit parfaitement l’angle de la rotation (ici, 90°).

Bonjour,
Félicitations pour votre site qui est très utile
Dans le chapitre introduction aux matrices de rotation vous écrivez (Désolé je ne peux pas mettre les flèches sur les vecteurs)
||u||=||u’ ||=1+m²
puis
u.u’=||u|| X ||u’ || X cos(theta) = (1+m²) cos(theta)
J’ai beau relire mon cours , je ne comprends pas que cela ne soit pas
u.u’=||u|| X ||u’ || X cos(theta) = (1+m²) (1+m²)cos(theta)=(1+m²)² cos(tetha)
Il y a certainement qq chose que je n’ai pas compris dans le calcul du produit scalaire.
En vous remerciant de m’avoir consacré de votre temps
Bonjour. Il y avait une erreur dans le texte : j’avais oublié de mettre les carrés aux normes de \(\vec{u}\) et \(\vec{u’}\). On doit avoir \(\|\vec{u}\|^2=\|\vec{u’}\|^2=1+m^2\).
Ainsi, on a bien \(\vec{u}\cdot\vec{u’}=\|u\|^2\cos\theta=(1+m^2)\cos\theta\).
cos(a+b)=cosa.cosb-sina.sinb provient de la matrice d’une rotation: or vous me la donnez comme une vérité, dont je doute! montrez moi cos(a+b)=….
Les formules d’addition peuvent être prouvées à l’aide du produit scalaire, ou même à l’aide des nombres complexes, et ne proviennent sûrement pas des matrices de rotation.
Bonjour, en fin d’exercice, vous indiquez : Une équation cartésienne de (d’) est donc de la forme:bx−ay+c=0.
Or nous sommes partis au debut sur la classique equation cartesienne : ax + by +c =0 avec un vecteur directeur (-b,a)
Cela veut dire que a la fin c = pasin(theta) – pbcos(Theta).
Et c’est bien ce que vous avez ecrit dans vos 2 programmes Python
Dites moi ce que vous en pensez ?
Eric, professeur de Mathématiques.
Bonjour. Je ne suis pas parti de (d): ax+by+c=0, mais de (d): y = mx+p. « a » et »b » sont les coordonnées d’un vecteur directeur de (d’).
on parle de d’ :
(d)’: ax+by+c=0
Regardez votre code Python pour la formuloe de c et vous comprendrez .
Vous pouvez donc corriger votre démonstration .
Il n’y avait pas d’erreur dans la démonstration, preuve en est que le programme donnait bien l’image souhaitée par rotation. L’incompréhension venait du fait que j’avais interverti ‘a’ et ‘b’ dans le programme, tout en changeant leur ordre pour le tracé de (d’), ce qui était peu logique avec du recul, et peu compréhensible. J’ai donc repris le code pour respecter ce qu’étaient vraiment ‘a’ et ‘b’. Pour ce qui est de ‘c’, dans la démonstration, pas d’erreur. J’ai tout de même repris légèrement pour un peu plus expliquer. L’équation de (d’) telle que démontrée n’est pas ax+by+c = 0 mais bien bx-ay+c=0.